Scenari innovativi di mobilità urbana sostenibile

PIERLUIGI COPPOLA, FULVIO SILVESTRI, FRANCESCO DE FABIIS
Negli ultimi anni, la mobilità delle persone in ambito urbano è stata caratterizzata da quattro tendenze principali: la diffusione di nuovi modelli di business basati sulla condivisione dei mezzi di trasporto individuali (ad esempio il car-sharing), la crescita della mobilità attiva e della micromobilità, la transizione energetica verso mezzi ad alimentazione alternativa, con conseguente ridotto impatto ambientale, e l’implementazione delle prime piattaforme integrate di offerta di servizi di mobilità multimodale, comunemente note come Mobility-as-a-Service (MaaS).
Si tratta solo di alcune premesse della rivoluzione che a breve riguarderà i servizi e le infrastrutture di trasporto, grazie ai progressi della ricerca applicata nei veicoli a guida autonoma e nei sistemi di connessione tra veicoli e infrastruttura, che trasformeranno radicalmente il panorama della mobilità urbana.
I veicoli a guida autonoma saranno in grado di percepire l’ambiente circostante e di muoversi in sicurezza (anche in condizioni di traffico promiscuo, ovvero interagendo con altri veicoli o con i pedoni), richiedendo un intervento umano minimo o addirittura nullo. Sono previsti diversi livelli di automazione, secondo la classificazione più utilizzata nel settore automobilistico della International Society of Automotive Engineers (SAE):
- Livello 0 – Nessuna automazione, l’esecuzione di tutti i movimenti di guida è lasciata al conducente;
- Livello 1 – Assistenza, il conducente ha il controllo dei movimenti del veicolo, ma il sistema può intervenire sulla direzione di sterzata e sulla velocità;
- Livello 2 – Automazione parziale, sia direzione di sterzata che velocità sono controllate dal sistema, ma il conducente deve essere in grado di apportare eventuali correzioni in circostanze singolari;
- Livello 3 – Automazione condizionale, il sistema ha il completo controllo del veicolo, ma il conducente deve essere pronto ad intervenire su richiesta del sistema;
- Livello 4 – Automazione avanzata, il sistema sostituisce completamente il conducente, ma in ambiti operativi specifici;
- Livello 5 – Automazione completa, il sistema fornisce le stesse prestazioni del Livello 4, ma senza alcun limite di ambito operativo; questo è detto anche livello “mind off”, ossia il conducente diviene un semplice passeggero, senza più l’onere della guida o del suo controllo, potendosi così dedicare completamente ad altre attività.
Oggi sono ormai comunemente immatricolati veicoli equipaggiati con sistemi di assistenza alla guida (Advanced Drivers Assistance System, ADAS) di livello 2 e sono già in commercio veicoli con sistemi di automazione parziale della guida di livello 3. Prototipi di veicoli completamente autonomi (livello 5), in grado di percepire l’ambiente circostante basandosi solo sui dispositivi di rilevamento montati a bordo, vengono sperimentati su pista e su tracciati cittadini dedicati.
Parallelamente a questi, sono in fase di sviluppo veicoli dotati di un alto grado di connettività, basati su avanzate tecnologie di comunicazione tra il veicolo e l’ambiente circostante, di tipo:
- Vehicle-to-Vehicle (V2V) per lo scambio di dati tra veicoli, al fine, ad esempio, di fornire o ricevere avvisi su situazioni di pericolo dovute a brusche decelerazioni, incidenti, e condizioni meteo avverse;
- Vehicle-to-Infrastructure (V2I) per lo scambio di dati tra veicolo e infrastruttura, al fine, ad esempio, di essere avvisati sulle condizioni locali del traffico per armonizzare la propria velocità o adattarla quando si transita in aree con particolari limitazioni;
- Vehicle-to-People (V2P) per lo scambio di dati tra veicolo e dispositivi ‘wearable’, ad es. smartphone, al fine di ricevere informazioni quali la presenza di un utente vulnerabile intento ad attraversare la strada o un gruppo di bambini appena sceso dallo scuolabus;
- Vehicle-to-Network (V2N) per lo scambio di dati tra veicolo e una centrale di controllo e monitoraggio del traffico, per ricevere informazioni in tempo reale sulle condizioni globali di deflusso in tutta la rete di trasporto.
Tali sistemi non richiedono alcun livello di automazione e permettono di aumentare la sicurezza, il comfort di guida e, più in generale, le prestazioni del sistema di trasporto. Di fatto, Automazione e Connettività sono due concetti distinti, talvolta impropriamente confusi, e la ricerca nel settore automotive al momento procede seguendo due approcci:
uno più orientato alla piena automazione (livello 5), che punta ad un veicolo autonomo “indipendente” dagli altri elementi del sistema di trasporto, e non necessariamente connesso agli altri veicoli e all’infrastruttura; un altro approccio orientato al progressivo sviluppo di funzioni e sistemi di guida sempre più automatizzati, abilitati dalla connessione tra veicoli e infrastrutture (smart roads).
Ma quali sono i benefici che porteranno i veicoli autonomi e sempre più connessi?
La comunità scientifica è divisa tra coloro che prefigurano nuove opportunità di collegamento e servizi di trasporto più efficienti, e altri che paventano l’aumentano della congestione stradale e strade meno sicure. In realtà, molto dipenderà da quale sarà il modello di consumo che si affermerà: se basato sul possesso esclusivo, sostituendo a mano a mano le auto tradizionali, oppure se basato sull’utilizzo condiviso, ovvero fornendo un servizio di spostamento “a richiesta” come accade oggi con i taxi.
Di conseguenza, la modalità di utilizzo prevalente dei veicoli autonomi potrà essere individuale (veicolo privato a servizio del singolo utente), condivisa (veicolo a servizio di più utenti) o collettiva (veicolo a servizio contemporaneo di più utenti).
È chiaro quindi che i benefici dipenderanno da quale sarà la modalità di utilizzo prevalente che si affermerà. Nello scenario più conservativo, in cui gli utenti acquisteranno i veicoli autonomi, vi saranno pochi cambiamenti rispetto a quanto accade oggi e anzi le percorrenze su strada (e quindi i consumi e le emissioni inquinanti) potranno aumentare, a causa della disponibilità di veicoli anche per utenze che oggi non sono abilitate alla guida (ad es. i giovani e gli anziani) o per effetto di viaggi “a vuoto” (senza passeggero a bordo), per riportare il veicolo a domicilio e renderlo disponibile ad altri membri della famiglia.
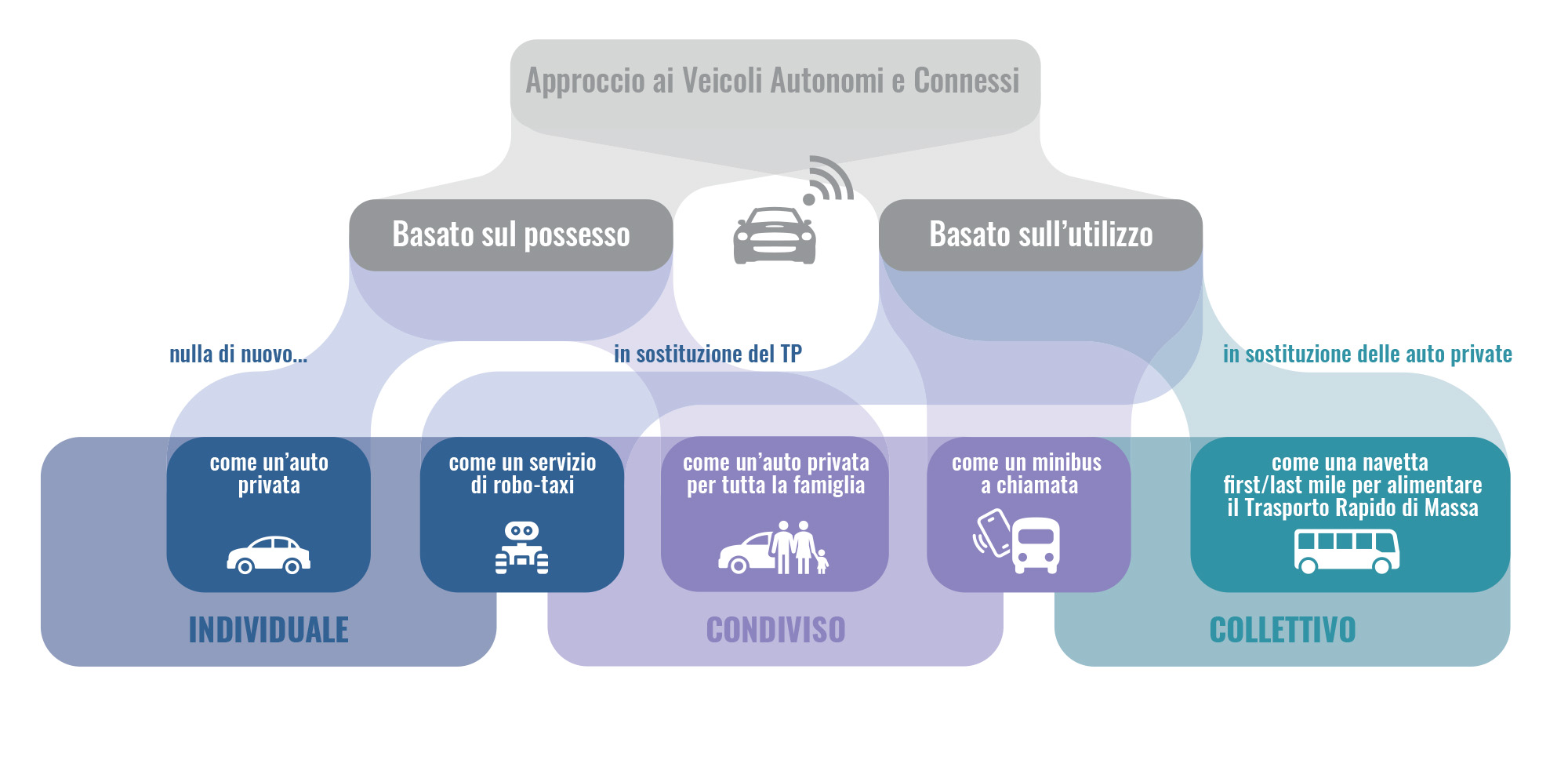
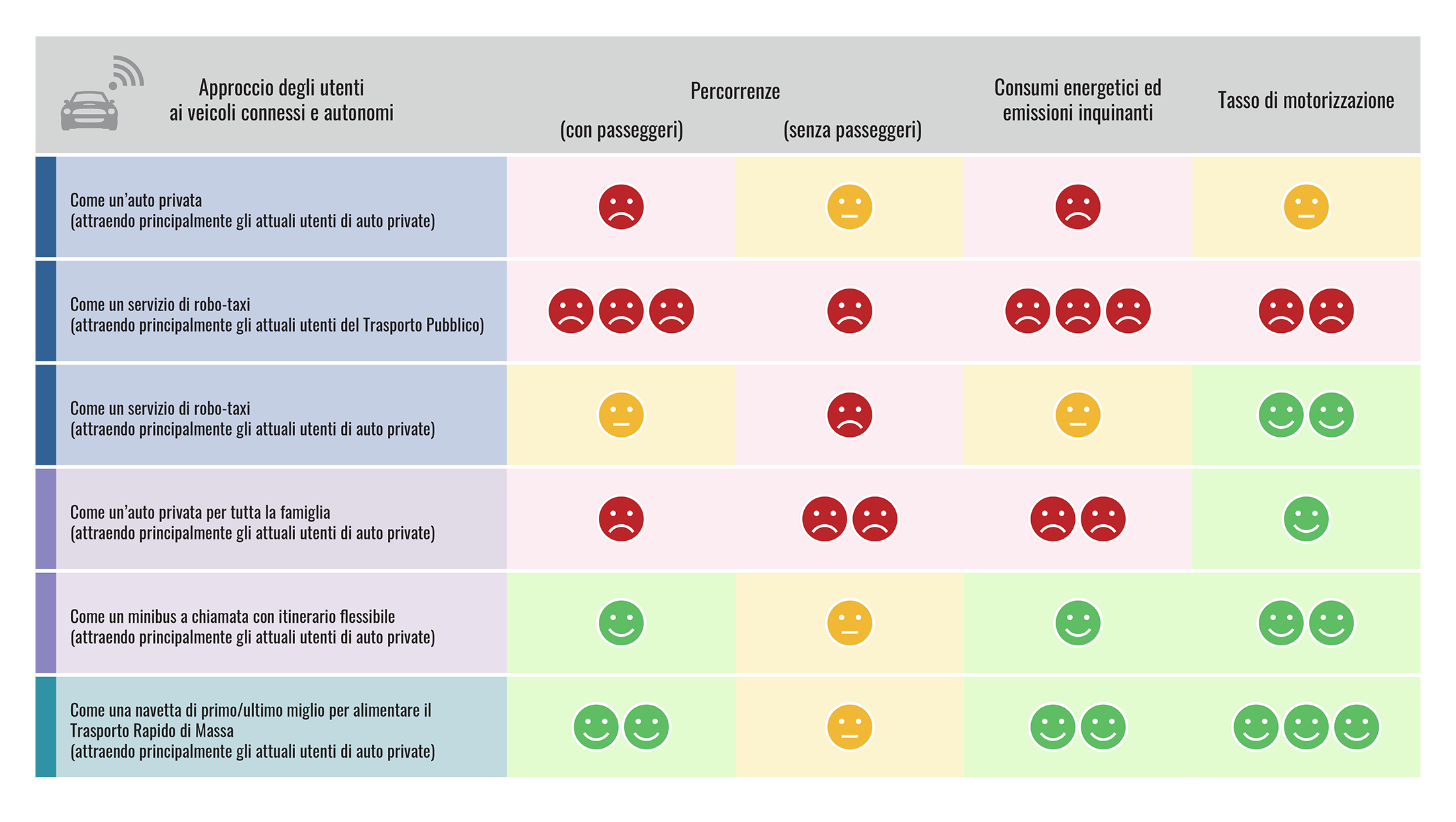
Considerazioni diametralmente opposte potrebbero essere fatte se i veicoli autonomi fossero utilizzati per offrire servizi di mobilità a richiesta (sul modello Uber) a tariffe più competitive di quelle attuali, grazie ai risparmi di costi operativi dovuti all’assenza dell’autista. Il rischio è che un siffatto servizio di taxi autonomo potrebbe essere molto attrattivo anche per gli utenti del trasporto pubblico, generando così uno shift modale da modi di trasporto collettivi a modi individuali, con conseguente aumento del numero di mezzi circolanti nelle città, delle percorrenze, dei consumi e delle emissioni di inquinanti. È opportuno, pertanto, che la diffusione di tali servizi possa essere orientata principalmente all’offerta di navette su percorsi fissi e ad orari predeterminati, per alimentare (“feeder”) la rete di trasporto rapido di massa (metro, tram, …).
Benché qualitative, le considerazioni di cui sopra mettono in luce quanto sia necessario valutare attentamente l’ampio spettro dei potenziali impatti dei veicoli autonomi sui sistemi di trasporto rispetto ai cambiamenti che questi porteranno alla mobilità, considerando anche l’impatto sull’uso del suolo, sull’inclusione sociale e altro ancora.
Le città dovranno quindi prepararsi al cambiamento in una duplice ottica: di breve termine, investendo nelle innovazioni tecnologiche che si renderanno disponibili sul mercato per integrarle nei sistemi di trasporto esistenti; di lungo termine, pianificando al contempo la mobilità con un approccio visionario che sia in grado di cogliere la portata dell’innovazione che ci attende, ripensando i sistemi di mobilità, ivi compresi i servizi, le tariffe e la regolamentazione del trasporto pubblico, la manutenzione delle infrastrutture e la logistica urbana, affinché sia garantita una transizione economicamente sostenibile, graduale e inclusiva.
È a partire proprio da queste premesse che stanno nascendo i primi Living Labs della mobilità urbana (si veda ad esempio, il progetto Interreg ADRION TRIBUTE – https://tribute.adrioninterreg.eu/) che promuovono la sperimentazione di un nuovo approccio basato su forme di cooperazione “Pubblico-Privato-Ricerca-Cittadini” in cui co-progettare e co-implementare nuove idee, servizi e soluzioni per una mobilità urbana innovativa e sostenibile.
Prof. PIERLUIGI COPPOLA – PhD in infrastrutture e sistemi di trasporto, è professore associato di Trasporti del Politecnico di Milano. L’attività di ricerca è svolta prevalentemente nel campo della modellazione e nei metodi di valutazione degli impatti economico-territoriali dei sistemi di trasporto. È membro del Board dell’Association for European Transport (AET) e dello Steering Committee della World Conference Transportation Research Society (WCTRs), nonché Coordinatore del Pilastro 2 (Trasporti) della Strategia Europea per la Regione Adriatico-Ionica (EUSAIR). È stato responsabile scientifico di Progetti di Rilevante Interesse Nazionale (PRIN) ed ha collaborato a ricerche finanziate dalla Commissione Europea, in Olanda, Spagna e Regino Unito. La produzione scientifica è contenuta in oltre 100 pubblicazioni a diffusione nazionale ed internazionale e in numerose comunicazioni a convegni e seminari scientifici.
FULVIO SILVESTRI – Dottorando di ricerca presso il Dipartimento di Ingegneria dell’Impresa dell’Università di Roma “Tor Vergata”, svolge attività di ricerca nell’ambito dell’ingegneria dei trasporti, con particolare interesse alla modellazione della domanda di mobilità e alla pianificazione delle reti e dei servizi di trasporto. È Membro del “Young Researchers’ and Practitioners’ Forum” della European Transport Conference (ETC) e Ambasciatore dell’Association for European Transport (AET). È autore di numerose pubblicazioni su riviste e atti congressuali nazionali ed internazionali ed è inoltre revisore per le riviste scientifiche “European Transport Research Review” (Springer), “Journal of Advanced Transportation” (Hindawi) e “Case Studies on Transport Policy” (Elsevier).
FRANCESCO DE FABIIS – Dottorando di ricerca presso il Dipartimento di Meccanica del Politecnico di Milano, svolge attività di ricerca nel settore dell’ingegneria dei trasporti, con particolare interesse nella valutazione degli impatti economici e sociali degli interventi sui sistemi di trasporto e nelle politiche per la mobilità sostenibile. Dal 2020 è membro dello “Young Researchers ‘and Practitioners’ Forum” della European Transport Conference (ETC). Dal 2021 è membro del Doctoral Training Network (DTN) dell’EIT – Urban Mobility.