Innovative sustainable urban mobility scenarios

PIERLUIGI COPPOLA, FULVIO SILVESTRI, FRANCESCO DE FABIIS
In recent years, people’s urban mobility has been marked by four main trends – the spread of new business models based on sharing individual means of transport (e.g. car-sharing), the growth of active mobility and micro-mobility, the energy transition towards alternative means of power, with a consequent reduced environmental impact, and the implementation of the first integrated multimodal mobility services platforms, commonly known as Mobility-as-a-Service (MaaS).
These are only some presuppositions of the revolution that will soon involve transport services and infrastructure as a result of the progresses in applied research on autonomous vehicles and systems for connection between vehicles and infrastructure, which will radically transform the urban mobility panorama.
Autonomous vehicles will be able to perceive the surrounding environment and move safely (even in mixed traffic, i.e. interacting with other vehicles or pedestrians), requiring minimal or even no human intervention. According to the most used classification in the automotive sector, i.e. the International Society of Automotive Engineers (SAE) classification, there will be different automation levels:
- Level 0 – No Driving Automation, the driver performs all the driving tasks;
- Level 1 – Driver Assistance, the driver performs all the driving tasks but the system can intervene on the direction of steering and speed;
- Level 2 – Partial Driving Automation, the system controls both the direction of steering and speed but the driver must be able to make corrections, if necessary, in particular circumstances;
- Level 3 – Conditional Driving Automation, the system has complete control of the vehicle but the driver must be ready to intervene if required by the system;
- Level 4 – High Driving Automation, the system completely replaces the driver but only in specific operational design domains;
- Level 5 – Full Driving Automation, the system has the same performance as Level 4 without any limitations; this is also called the ‘mind off’ level, i.e. the driver becomes an ordinary passenger without the burden of driving or its control and thus he/she can fully focus on other activities.
Nowadays, vehicles equipped with Level 2 Advanced Drivers Assistance System (ADAS) are now commonly registered and vehicles with Level 3 partial automation systems are already marketed. Prototypes of full autonomous vehicles (Level 5), able to perceive the surrounding environment only based on on-board detection devices, are tested on the track and specific urban routes.
At the same time, vehicles with a high level of connectivity, based on advanced technologies for communication between the vehicle and the surrounding environment, are being developed:
- Vehicle-to-Vehicle (V2V) communication to exchange data between vehicles so that, for example, warnings on dangerous situations caused by sudden braking, accidents and poor weather conditions can be given or received;
- Vehicle-to-Infrastructure (V2I) communication to exchange data between vehicle and infrastructure to, for example, be advised to harmonise the speed on specific local traffic conditions or to adapt it when crossing areas with particular limitations;
- Vehicle-to-People (V2P) communication to exchange data between vehicle and ‘wearable’ devices, e.g. smartphones, to receive information such as a vulnerable user crossing the road or a group of children who have just got off the school bus;
- Vehicle-to-Network (V2N) communication to exchange data between vehicle and a traffic control and monitoring room to receive real time information on the overall traffic flow conditions in the whole transport network.
These systems do not require any level of automation and enable an increase in safety, driving comfort and, more generally, performance of the transport system.
In reality, Automation and Connectivity are two separate concepts, sometimes improperly confused, and, at present, research in the automotive sector follows two approaches:
the first more oriented to full automation (Level 5), which aims at an autonomous vehicle ‘independent’ from other elements in the transport system that is not necessarily connected to other vehicles and infrastructure; the second is instead oriented to the progressive development of increasingly automatised driving functions and systems, enabled by communication between vehicles and infrastructure (smart roads).
What benefits do autonomous and increasingly connected vehicles bring? The scientific community is divided between those who expect new connection opportunities and more efficient transport services, and others who dread the increase in road congestion and roads that are less safe. In actual fact, a lot will depend on the prevailing consumption model – whether based on exclusive ownership, slowly but surely replacing traditional cars, or based on shared use, i.e. providing ‘on demand’ services as happens today with taxis.
As a result, the prevalent use case of autonomous and connected vehicles may be individual (private vehicle used by a single person), shared (vehicle used by more than one person) or collective (vehicle serving multiple users at the same time). Therefore, it is clear how benefits will depend on the prevalent method of use. In the most conservative scenario, where users purchase autonomous vehicles, there will be few changes with respect to the current situation and, instead, vehicle kilometers travelled (and therefore consumption and pollutant emissions) could increase because of the availability of vehicles even for users who are currently not allowed to drive (e.g. young people and elderly) or as a result of ‘empty’ trips (without any passenger on board), to return the vehicle to the home and make it available to other members of the family.
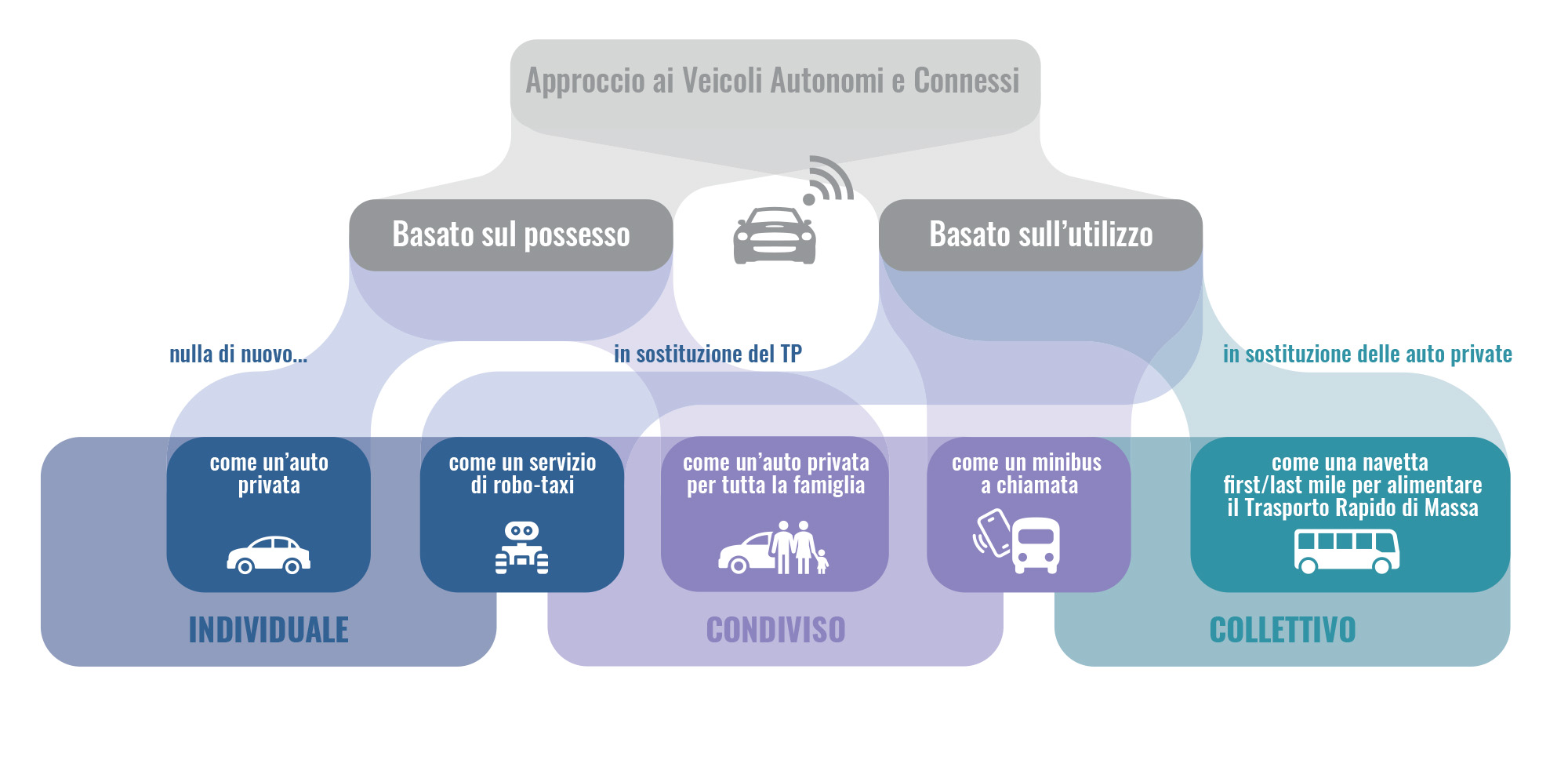
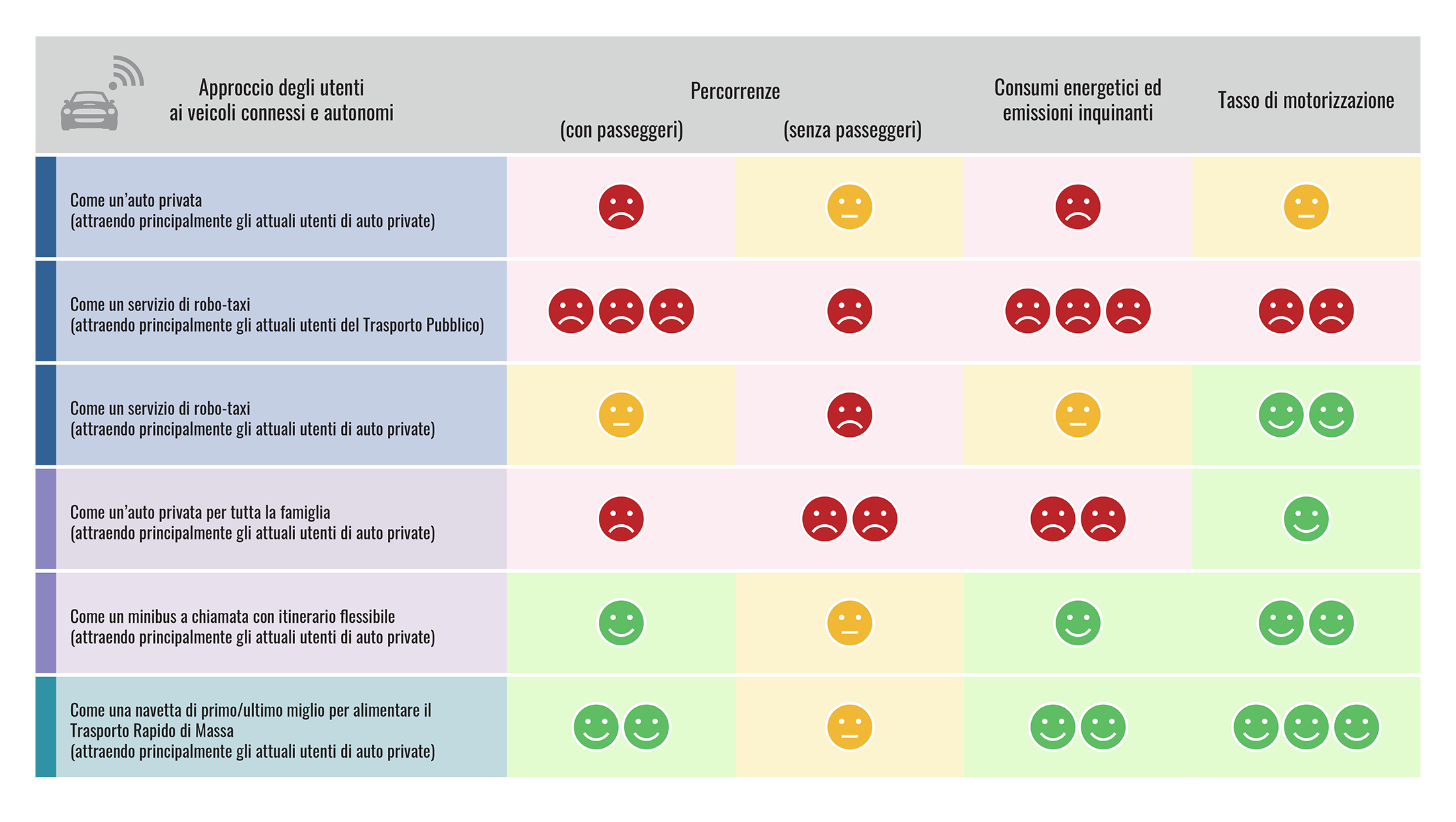
Diametrically opposing considerations could be made if autonomous vehicles were used to offer on-demand mobility services (similar to the Uber model) at more competitive rates than the current ones due to savings in operational costs because there is no driver. The risk is that such an autonomous taxi service could also be very attractive for public transport users, thus generating a modal shift from collective means of transport to individual modes with a resulting increase in the number of vehicles circulating in cities, vehicle kilometers travelled, consumption and pollutant emissions. As a result, it is opportune that the spread of such services be mainly oriented to the offer of shuttles on fixed routes at predetermined times, to feed the Mass Rapid Transit network (underground, trams, etc.). Although qualitative, the above considerations highlight the need to carefully assess the wide spectrum of potential impact of autonomous and connected vehicles on transport systems in relation to the changes they will make to mobility, also considering the impact on land consumption, social inclusion and yet other items.
So cities should prepare themselves for change from two different perspectives – a short term one, investing in technological innovations that will become available in the market to integrate them into the existing transport systems, and a long term one, planning at the same time mobility with a visionary approach able to grasp the extent of the innovation awaiting us, re-thinking mobility systems, together with services, tariffs and public transport regulation, infrastructure maintenance and urban logistics so that a gradual and inclusive, economically sustainable transition is guaranteed.
The first urban mobility Living Labs are starting from these premises (e.g. see the Interreg ADRION TRIBUTE project – https://tribute.adrioninterreg.eu/) which promote the experimentation of a new approach based on ‘Public-Private-Research-Citizens’ forms of co-operation in which new ideas, services and solutions for innovative, sustainable urban mobility are co-designed and co-implemented.
Prof. PIERLUIGI COPPOLA – has a PhD in transport infrastructure and systems. He is an associate professor of Transport at the Politecnico di Milano. His research is mainly in the field of modelling and assessment methods of the economic-territorial impact of transport systems. He is a member of the Board of the Association for European Transport and of the Steering Committee of the World Conference Transportation Research Society. He is also Co-ordinator of Pillar 2 (Transport) of the European Strategy for the Adriatic-Ionic Region (EUSAIR). He has been scientific manager of Projects of National Relevant Interest (Progetti di Rilevante Interesse Nazionale – PRIN) and has worked on research projects financed by the European Commission in The Netherlands, Spain and the United Kingdom. His scientific production consists of more than 100 national and international publications and several communications at conventions and scientific seminars.
FULVIO SILVESTRI – PhD candidate at the Department of Enterprise Engineering of the University of Rome ‘Tor Vergata’. He carries out research in the field of transport engineering with special interest in demand modelling and transport networks and services planning. He is a Member of the ‘Young Researchers’ and Practitioners’ Forum’ of the European Transport Conference and Ambassador of the Association for European Transport. He is the author of several publications in national and international journals and congress proceedings. He is also a reviewer for the scientific journals ‘European Transport Research Review’ (Springer), ‘Journal of Advanced Transportation’ (Hindawi) and ‘Case Studies on Transport Policy’ (Elsevier).
FRANCESCO DE FABIIS – PhD candidate at the Department of Mechanical Engineering of the Politecnico di Milano. He carries out research in the transport engineering sector with special interest in the assessment of the economic and social impact of transport systems interventions and policies for sustainable mobility. Since 2020, he has been a Member of the ‘Young Researchers’ and Practitioners’ Forum’ of the European Transport Conference. He has been a Member of the Doctoral Training Network of EIT – Urban Mobility since 2021.